














1 总则
1.1 目的
为统一自动驾驶传感器工厂下线标定技术标准,规范 Camera、LiDAR、IMU 单设备及多传感器联合标定的精度指标、检测方式、判定准则与异常处理要求,保障传感器内参、外参、时间同步、图像与点云质量满足自动驾驶感知、定位及360°环视量产功能要求,特编制本详细精度说明文档。本文档作为产线EOL标定实施、设备验收、质量判定、日常校准的技术依据。
1.2 适用范围
本文档精度要求适用于全系车型工厂静态EOL下线标定场景,覆盖所有车载感知传感器,具体包含:
• 前视广角/窄角感知摄像头
• 前视、后视、侧视环视摄像头模组
• 车载主激光雷达(LiDAR)
• 车载惯性测量单元(IMU)
• Camera-LiDAR-IMU 多传感器联合标定精度管控
1.3 引用标准
• 整车EOL下线标定通用技术规范
• 自动驾驶车载传感器外参标定精度设计规范
• 车载相机成像质量与重投影误差验收标准
• 激光雷达点云匹配、测距精度及反射率检测标准
• 车载IMU零偏、随机游走及时间同步精度技术要求
• 多传感器融合标定精度量产验收规范
2 摄像头(Camera)精度要求
2.1 单摄像头标定精度
本章节规定所有前视、环视、侧视、后视摄像头单设备标定精度指标、检测方式及验收判定标准,为单相机标定合格的硬性准入条件。
精度项目
要求指标
检测方式
判定标准
重投影误差
≤ 0.5 pixel
标定算法自动计算多帧特征点均值
单帧、多帧均值均满足阈值要求
外参角度精度(Yaw/Pitch/Roll)
≤ 0.1°
标定算法外参解算结果提取
三轴角度误差全部满足,无单项超标
外参位置精度(X/Y/Z)
≤ 5 mm
标定算法外参解算结果提取
三轴位置误差全部满足,无单项超标
镜头畸变校正误差
≤ 0.3 pixel
棋盘格标定板特征点拟合检测
图像无明显畸变、拉伸、偏移现象
曝光/白平衡一致性
无过曝、无欠曝、无反光干扰
机器自动检测+人工复核
标靶轮廓、角点、特征清晰可稳定识别
2.2 多摄像头拼接精度
针对全车多相机组网,规范相机之间视场衔接、图像拼接及时间同步精度,保障360°环视无错位、无盲区、无重影。
精度项目
要求指标
检测方式
环视拼接误差(车身边界)
≤ 10 mm
俯视全景拼接图特征点比对检测
前视/侧视/后视视场衔接误差
≤ 0.15°
多相机公共特征点匹配比对
多相机时间同步偏差
≤ 1 ms
硬件触发时间戳采集、软件比对校准
2.3 传感器装车安装工艺精度
规范传感器硬件装车初始安装误差,控制机械安装偏差对标定精度的影响,为软件标定提供合格硬件基础。
安装角度维度
允许安装偏差
偏航角 Yaw
±1°
俯仰角 Pitch
±1°
横滚角 Roll
±1°
3 激光雷达(LiDAR)精度要求
3.1 单雷达标定精度
定义单激光雷达外参标定、靶标识别、点云匹配、测距精度的量产准入指标,保证雷达感知位置、姿态、测距的准确性与一致性。
精度项目
要求指标
检测方式
靶标中心识别定位误差
≤ 5 mm
标靶点云聚类拟合中心比对
外参角度精度(Yaw/Pitch/Roll)
≤ 0.1°
标定算法外参解算结果提取
外参位置精度(X/Y/Z)
≤ 5 mm
标定算法外参解算结果提取
点云配准重合度
≥ 99%
标准靶标理论点云与实际点云拟合比对
测距精度(标定区域内)
≤ 2 cm
标准距离标定靶标实测比对
3.2 点云质量要求
管控激光雷达原始点云质量,剔除噪声、杂波、无效点干扰,保障标定数据有效、稳定、可复用。
检测项目
技术要求
有效点云率
≥ 98%
杂波/噪声点占比
≤ 2%
靶标反射率一致性
80%标准反射率靶标识别无跳变、无丢失
视场完整性
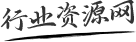
10个标定专用靶标全部完整处于雷达视场内
3.3 安装与环境约束要求
• 激光雷达装车安装高度偏差:≤ 2 cm,无高低偏移、倾斜安装问题
• 雷达探测视场内无遮挡物、无高亮强反射金属结构,避免点云畸变
• 标定支架、固定结构全覆盖低反射黑色泡棉,整体反射率控制在2%~5%,杜绝杂波干扰
4 IMU精度要求
4.1 IMU本体硬件精度
规范IMU传感器硬件固有精度指标,为姿态解算、融合标定、车辆定位提供基础硬件保障。
精度项目
技术指标
陀螺零偏稳定性
≤ 0.05 °/s
加速度零偏稳定性
≤ 0.005 g
角速度随机游走
≤ 0.01 °/√h
加速度随机游走
≤ 0.001 m/s²/√h
4.2 IMU标定精度
定义IMU内参校准、车体坐标系对齐、标定重复性精度要求,保障惯性数据与车体姿态高度匹配。
标定项目
技术要求
IMU内参标定误差
≤ 0.05°
IMU与车辆坐标系对齐精度
≤ 0.1°
连续10次标定重复性偏差
≤ 0.05°
4.3 多传感器时间同步精度
时间同步是多传感器融合标定的核心前提,全系统时间戳偏差需严格受控,避免融合错位、标定失效。
• IMU 与 Camera 时间同步误差:≤ 1 ms
• IMU 与 LiDAR 时间同步误差:≤ 1 ms
• 整车所有感知传感器统一时间戳、大偏差:≤ 1 ms
5 多传感器联合标定精度要求
5.1 Camera-LiDAR 联合标定精度
规范相机与激光雷达空间匹配、姿态对齐精度,保障图像与点云目标位置高度重合,满足感知融合功能要求。
精度项目
技术指标
公共特征点空间重合误差
≤ 10 mm
相对姿态对齐误差
≤ 0.15°
视场覆盖一致性
无感知盲区、无视场错位偏移
5.2 IMU-Camera-LiDAR 全链路联合精度
管控全车感知+惯性传感器全链路姿态传递误差,保障车辆姿态解算、环境感知、定位功能稳定可靠。
精度项目
技术指标
全链路姿态传递误差
≤ 0.15°
整车坐标系基准统一误差
≤ 2 mm
动态启动初始姿态对准误差
≤ 0.2°
5.3 整车坐标系基准精度
• 车辆中心基准定位误差:≤ 2 mm
• 车辆摆正后整体姿态(Yaw/Pitch/Roll)误差:≤ 0.1°
• 标定场地地面平面度引入的姿态误差:≤ 0.05°
6 场地与设备对标定精度影响要求
6.1 车辆摆正器精度要求
车辆摆正精度是标定基准精度的核心,直接决定全车传感器标定基准是否准确。
• 车辆左右对中定位精度:± 2 mm
• 车辆三轴姿态摆正精度(Yaw/Pitch/Roll):± 0.1°
• 摆正设备重复定位精度:≤ 0.05°
6.2 标定靶标安装精度要求
• 靶标实际安装坐标与理论坐标误差:≤ 5 mm
• 靶标板面平面度误差:≤ 0.1 mm
• 靶标安装角度偏差:≤ 0.1°
• 靶标板面反射率均匀性偏差:≤ ±5%
6.3 标定环境光照要求
• 标定间全封闭遮光设计,无自然光直射、无局部暗影、无高亮光斑
• 全场光照均匀度偏差:±10%以内
• 彻底规避镜面反射、杂散光干扰,保证相机成像、雷达点云稳定
7 精度验收判定规则
7.1 单台车辆标定判定规则
本文档所有传感器精度指标为量产强制达标项,单台车所有精度参数全部满足要求,判定为标定合格;任意单项精度超标,直接判定标定不合格,需重新摆正、重新采集标定。
7.2 批量产线验收规则
产线常态化稳定性判定:连续50台车辆标定精度全部达标、合格率100,判定标定系统设备、场地、靶标、环境状态稳定;若出现连续2台标定不合格,立即停止产线标定作业,开展设备校准、靶标复测、环境排查整改。
7.3 复测容错规则
单台车标定不合格,允许重新摆正车辆、重启采集标定流程1次二次复测;复测合格可正常下线;复测仍不合格,判定传感器硬件或安装异常,进入车辆返修排查流程。
8 精度异常问题原因与处置方案
异常现象
可能故障原因
对应处理措施
相机重投影误差偏大超标
镜头脏污、指纹灰尘遮挡;标定间光照不均、局部过曝;靶标模糊、磨损、脏污;镜头轻微偏移
清洁相机镜头镜片;调整全场光照参数;清洁或更换磨损靶标;复核相机安装姿态
LiDAR点云匹配偏差大、精度超标
靶标支架松动晃动、靶标偏移;支架裸金属反射产生杂波;靶标灰尘遮挡;雷达视场有遮挡
紧固所有靶标支架,复测靶标坐标;全包低反泡棉消除反射;清洁靶标板面;清理雷达视场遮挡物
IMU时间同步偏差超标
传感器线束接触异常;硬件触发配置错误;车端时间戳同步参数异常
检查锁紧传感器线束接头;重新刷写同步配置参数;校整车端传感器时钟同步
多传感器联合标定偏差超标
系统外参初始配置值错误;整车坐标系基准错乱;车辆摆正偏差超标;场地基准偏移
重置标定系统初始外参;重新校准整车坐标系;复测摆正器精度;全场靶标坐标复校标定
9 附录:核心精度指标速查表
本附录汇总全文关键量产精度阈值,便于快速查阅、现场对标、验收核对。
传感器类型
核心精度检测项
合格阈值
摄像头
图像重投影误差
≤0.5 pixel
摄像头
外参三轴角度误差
≤0.1°
激光雷达
靶标中心定位误差
≤5 mm
激光雷达
外参三轴角度误差
≤0.1°
IMU
陀螺零偏稳定性
≤0.05°/s
多传感器联合
特征点空间重合误差
≤10 mm
全系统
传感器时间同步偏差
≤1 ms
文档结尾:本精度规范为静态EOL传感器标定wei一量产验收依据,所有产线改造、设备调试、标定作业、质量验收均需严格遵照本文档执行。










 冀公网安备13010402003046号
冀公网安备13010402003046号
