
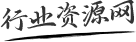













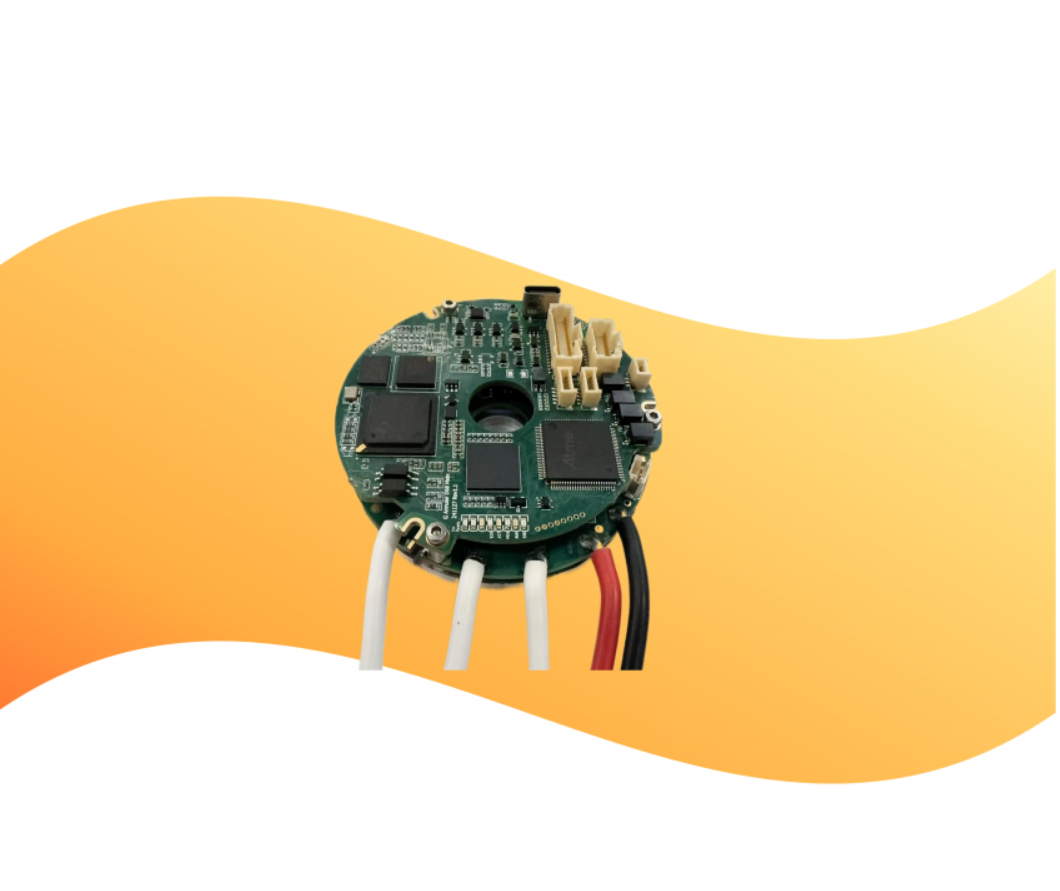
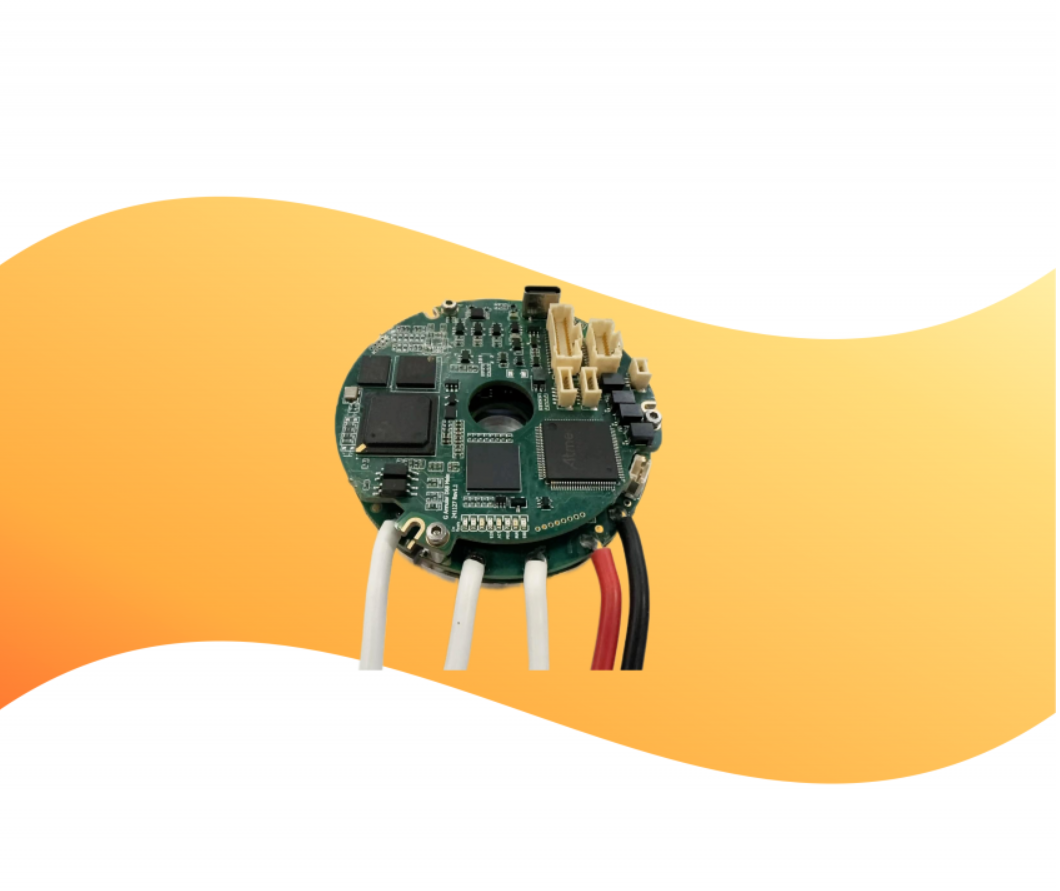
C68是用在机器人关节模组上面的伺服驱动器
控制模式:位置,速度,转矩;
◆ 采样频率(时间) 电流环:10KHz;速度/位置环:10KHz;
◆ 带宽:电流环一 般为10kHz,随参数调整与负载电感有所变化;
◆ 运动模式:电子齿轮,电子凸轮,比例联动,点到点;
◆ 可编程保护:位置误差,过流,过压或欠压,I²t ,输出短路过载
等多方位保护功能;
◆ 驱动电机类型:三相步进电机、无刷电机、有刷电机、直线电
机、音圈电机等;
◆ 位置反馈:绝对式编码器、增量式编码器、霍尔、模拟量正余弦
(Sin/Cos)编码器 (1.0Vp-p) 、旋转变压器 (Resolver)等;
◆ 脉冲响应频率最高可达 2MHz ,具有数字滤波功能;
◆ RS232 串行接口,波特率可达 115KB;
◆ CAN2.0 局域总线,兼容 CANopen DS-402 ,波特率最高1MHz ;
◆ 电源电压:11-95 VDC;
◆ 符合CE:EN IEC 55014- 1:2021 EN IEC 55014-2:2021 标准















 冀公网安备13010402003046号
冀公网安备13010402003046号
