














详情描述
智能车 L2 标定旨在通过精准调整车辆位姿、采集并解算传感器对标靶的数据,对比实际与设计位姿,确保传感器位姿误差在标准范围内,为自动驾驶系统提供可靠的感知数据基础,保障智能车在 L2 级别自动驾驶模式下能精准识别环境、做出正确决策 。
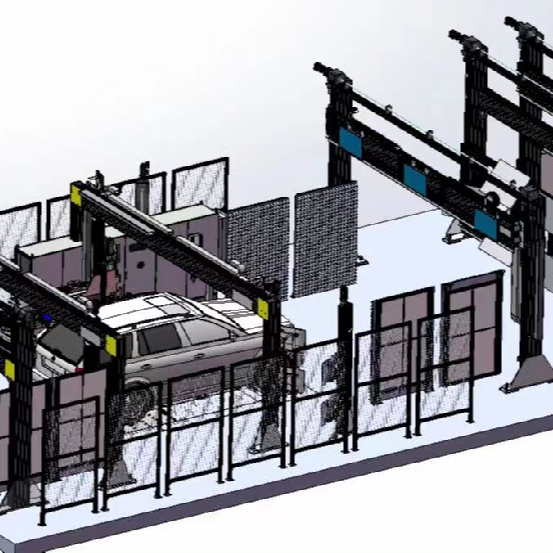
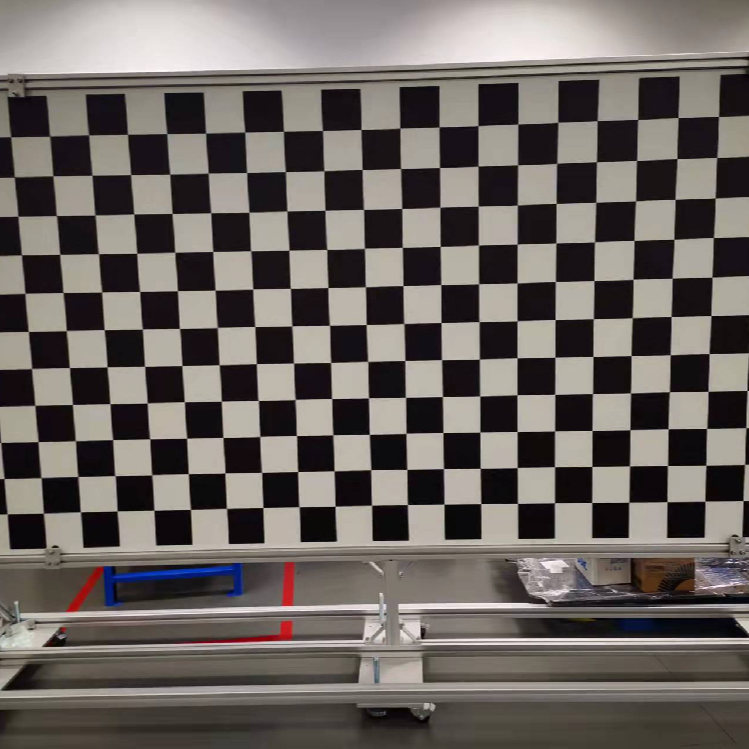
智能车 L2 级标定流程如下:将车辆驶入标定间,利用底盘摆正器调整车辆位置和姿态,使车辆坐标系与标定间基准坐标系的偏差在毫米级与亚度级容差范围内。随后,同步启动摄像头、激光雷达、毫米波雷达等传感器,采集几何标靶和二维码标靶的信息。视觉传感器获取图像像素和纹理,激光雷达采集三维点云,毫米波雷达探测距离、速度和角度数据。这些数据经处理后,分别用张氏标定法、ICP 算法、多站时差定位原理等解算,将得到的传感器位姿参数转换到车辆坐标系,与设计值对比。当误差符合标准阈值时,标定通过并生成报告;若误差超差,则触发预警。




使用流程上,针对L2和L4车型标定分别制定清晰的操作流程。L2车型标定时,通过对L2标定间(见下图虚线内)的外围实施遮盖幕布、显示器息屏、隐匿新增标靶等方法,沿用已有L2标定流程;L4车型标定时,启用新增标靶并利用自研“自动标定软件”,结合“高精度三维基准地图”进行标定。同时,方案突出标靶灵活配置和真值按需更新两大亮点,通过预留安装孔、改变显示器参数、复用L2龙门架伺服电机、更换标靶类型等方式实现标靶灵活配置,采用工业级高精度全息扫描仪和自研算法实现真值数据获取与更新,在提升系统可扩展性的同时,显著降低建设成本,且可以保证标定精度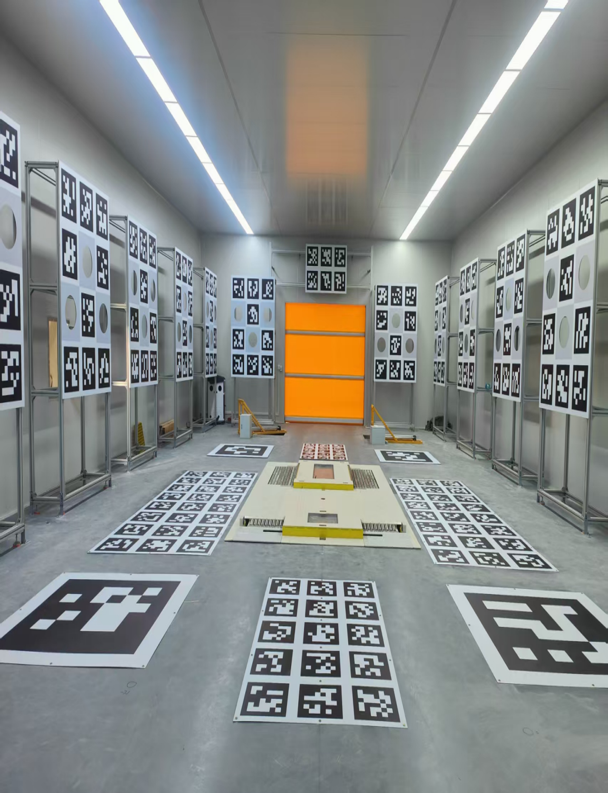





 冀公网安备13010402003046号
冀公网安备13010402003046号